扩散模型应用·图生图与图像恢复
封面来自 CivitAI.
图生图可以泛指基于输入图像生成新图像的过程,因此诸如 image restoration(超分、去噪、填充、上色等)、image-to-image translation、style transfer 等任务都可以归为其中。特别地,本文不包括基于文本的图像编辑方法,相关内容可在扩散模型应用·基于文本的图像编辑中查看。
SR3
Google TPAMI 2022 2021.04.15
SR3[1] 将 DDPM 应用在了图像超分辨率中,取得了 SOTA 的效果。超分辨率是一种以低分辨率图像为条件的生成任务,把低分辨率图像融入模型的方式很简单——将其 bicubic 插值后 concatenate 到输入即可(作者也尝试了更复杂的,如 FiLM,但发现效果无明显差别)。另外,作者发现在 concatenate 之前做一些高斯模糊扰动能够有效提升 FID 2 个点。
与 DDPM 相比,SR3 做了一些有趣的改变。训练时,对于时间步
最后,论文中零散地提及了三个 future research,可供参考:
- 给前向过程加入条件
- 通过
- 引入类似于 BigGAN 的 quality-diversity trade-off,当然我们现在知道 classifier(-free) guidance 提供了一种解决方案。
点击查看 SR3 的生成样例(摘自论文)




SDEdit
Stanford CMU ICLR 2022 2021.08.02
SDEdit[2] 的思想一张图就能看明白:
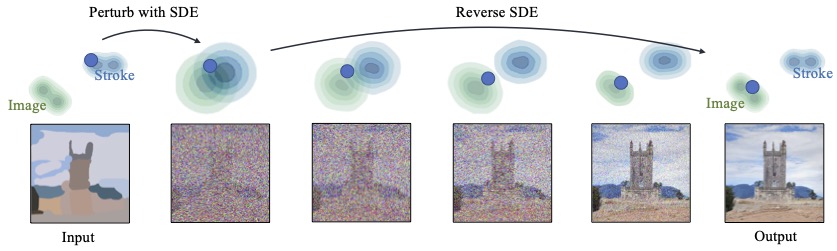
真实图像和我们画的图像分属两个分布,我们通过前向加噪过程让两个分布的支撑集越来越大,直到产生交集就停下。从交集中的一点出发,用在真实图像上训练好的扩散模型逆向去噪,就回到了真实分布。
从图像处理的角度,我们知道加噪过程首先破坏的是高频信息,然后才破坏低频信息。所以当我们加噪到一定程度时,就可以去掉不想要的细节纹理,但仍保留大体结构,于是生成出来的图像就既能遵循输入的引导,又显得真实。
显然,这里一个关键问题就是在什么时候停止加噪。如果停的太早,那么结果不够真实;如果停的太晚,那么可能丢掉了我们想要的引导。论文里称之为 realism-faithfulness trade-off.
遗憾的是,这个问题没有一个通用的解答。它跟用户究竟想要更真实还是更还原有关,还跟引导图像本身的质量有关——如果引导图像是一片白色,那怎么着也没法很还原。一般而言,作者说在

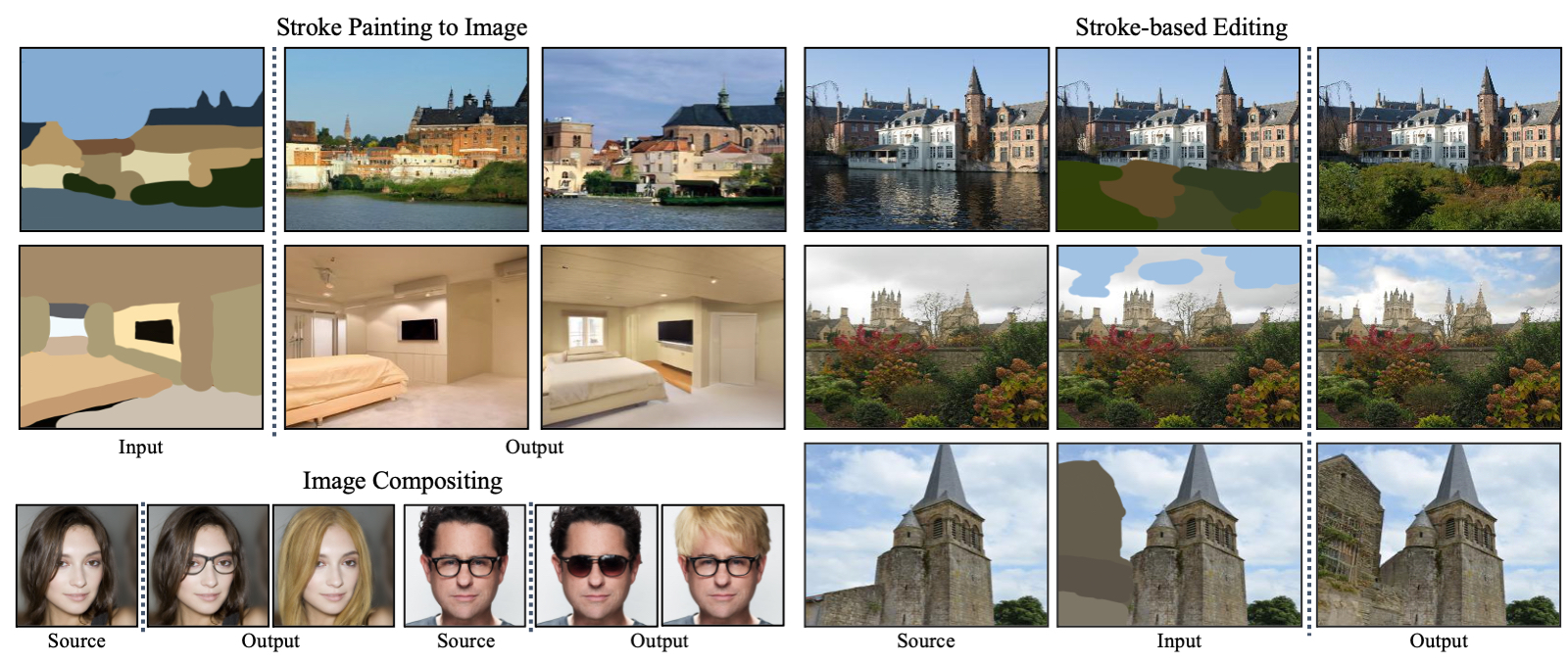
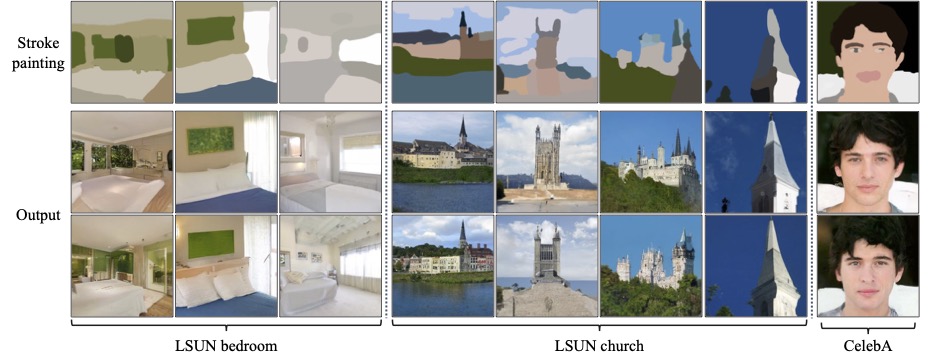
点击查看 SDEdit 的生成样例(摘自官网)
ILVR
ICCV 2021 (oral) 2021.08.06
给定一张参考图像

可以看到,在 DDPM 给出的
下采样率
ILVR 与 classifier guidance 的联系
是否有人觉得,ILVR 似曾相识?没错,ILVR 和 classifier guidance 的本质是一样的!
- ILVR:对采样的结果偏移了
- Classifier guidance:对采样分布的均值偏移了
一方面,偏移结果(先采样再偏移)和偏移均值(先偏移再采样)显然是等价的;另一方面,
更有甚者,二者都有一个控制引导强度的超参数:下采样率
事实上,后文的许多工作都可以与 classifier guidance 建立起类似的联系。这类方法的特点是无需训练,只需要加载预训练模型,对逆向采样过程施加引导即可,对算力要求十分友好。
ILVR 可以有许多有趣的应用,比如给一个在狗上面训练的模型以猫作为参考图像,并合理控制
点击查看 ILVR 的生成样例(摘自论文)

Palette
Google SIGGRAPH 2022 2021.11.10
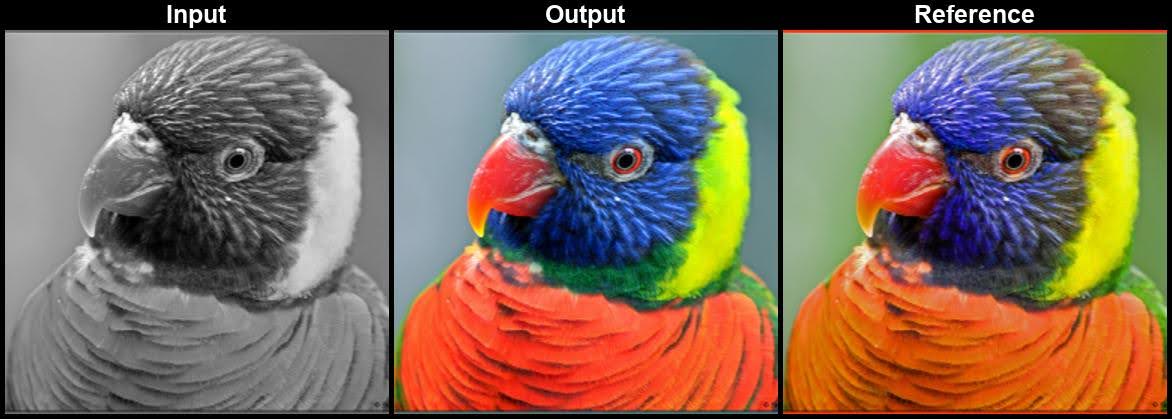
Palette[4] 是 Google 提出的基于扩散模型做 Image-to-Image Translation 的统一框架,并分别在 colorization, inpainting, uncropping (outpainting) 和 JPEG restoration 四个任务上做了实验。Palette 并没有对不同任务做特别的调参、定制网络架构或任何辅助的损失,事实上,它也没对扩散模型做什么特别的改变,仅仅是把不同任务的退化后的图像当作条件给到模型而已。可能唯一需要提一下的就是对于 inpainting 和 uncropping (outpainting),作者没有把 binary mask 给到模型,而是把缺失区域填上 Gaussian noise,这样的设置与扩散模型更搭。
作者做了两方面的 ablation study:
- 常用 U-Net 架构里面的 (global) self-attention 真的有用。作者实验对比了 local self-attetion、无 attention 但用 dilated convolution、无 attention 但叠双倍的 resnet blocks,最后还是发现沿用 DDPM 就有的 attention 层最管用。
- 许多基于扩散模型的图像恢复或翻译任务都采用的是 L1 loss 而非 L2 loss(如上文的 SR3 就用的 L1),作者实验发现二者的采样质量差不多,但是 L2 loss 能给出更多样的结果。推测是 L1 loss 倾向于让模型丢掉更多的模式。
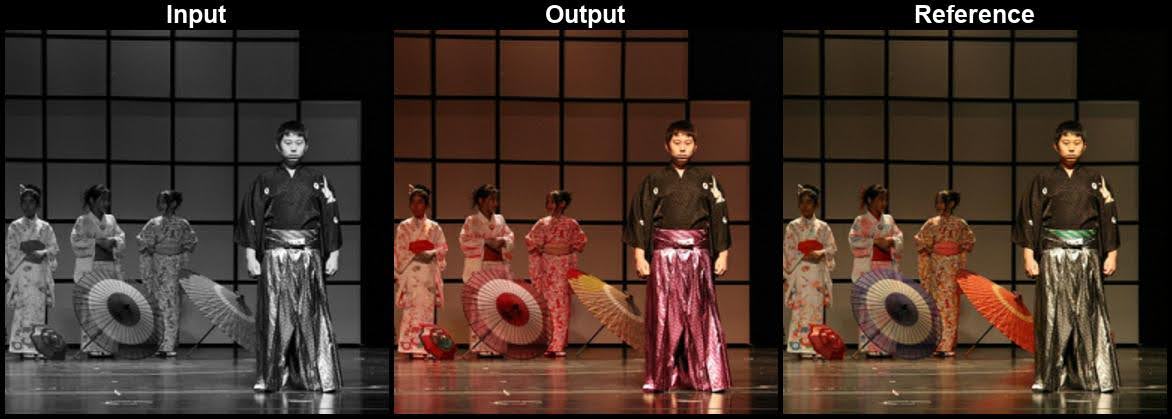
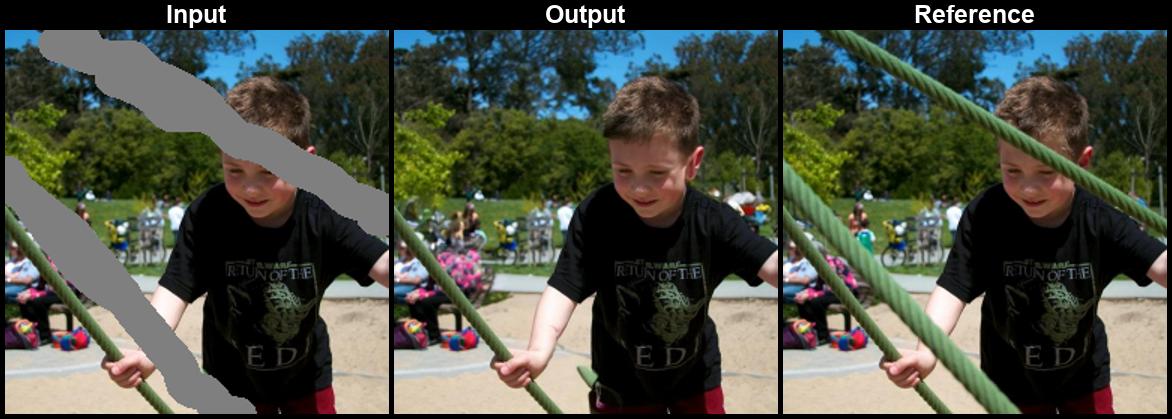
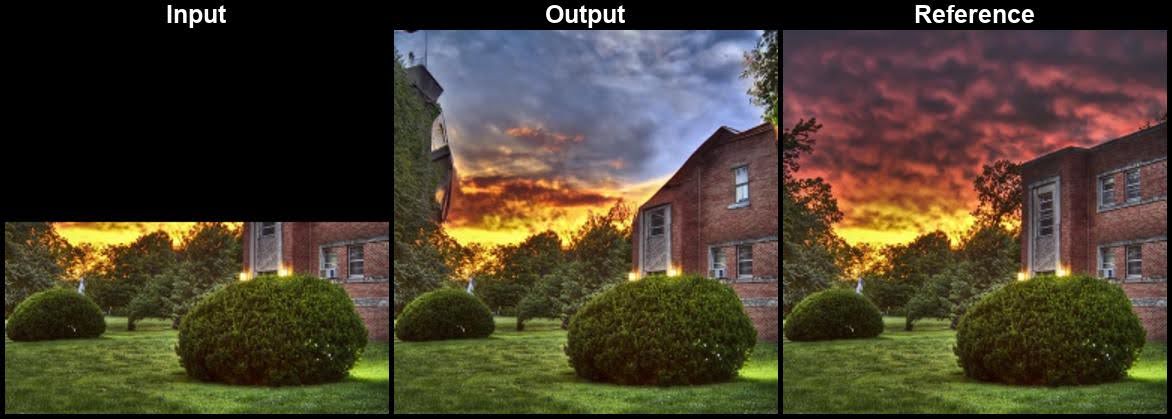
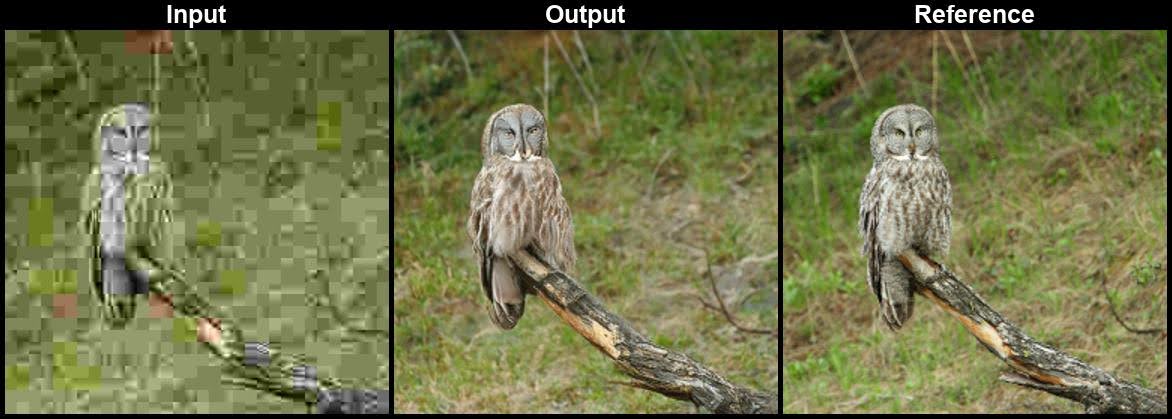
点击查看 Palette 的生成样例(摘自官网)




RePaint
CVPR 2022 2022.01.24
RePaint[5] 是专注于 image inpainting 任务的模型,其基本思想与Blended Diffusion[6] 的 mask guidance 是一样的,即对于采样过程的每一步,掩码内使用模型的预测结果,而掩码外使用真实图像的加噪结果,如下图所示:

然而,上述采样模式会导致一个严重的问题——mask 内填充的内容与 mask 外已知的内容在语义上不能很好地匹配。这是因为针对已知部分的加噪过程并没有考虑 mask 内生成的部分。尽管在下一步模型会试图和谐化上一步的结果,但它本身又会带来的新的不和谐,所以这个问题会一直存在。更有甚者,我们的 noise level 是逐渐减小的,所以越往后越难更正前面各步带来的不和谐。
但是,考虑到 DDPM 的机制是生成符合数据分布的图像,它理应收敛到语义匹配的结果上,只是实际采样时每一步都引入的不和谐让收敛过程变得很慢。为此,作者提出了 resampling 技术,即不断地把生成的

显然,resampling 的代价就是采样时长变成了原本的
相比传统的基于 Auto-Encoder + GAN 的模型,基于扩散模型的 RePaint 有一个显著的优势:仅一个预训练模型就能无缝适配任意形状的 mask. 这是因为 RePaint 只改动了扩散模型的采样过程,不必专门为填充任务训练。作者尝试了几种不同的 mask 设置:Wide、Narrow、SR 2x、Alt. Lines 、Expand、Half,都取得了不错的效果。
点击查看 RePaint 的生成样例(摘自官方 repo)


DDRM
2022.01.27
DDIB
ICLR 2023 2022.05.16
DDIB[8] 的理论写得非常 fancy,联系了 Schrödinger Bridge Problem、Optimal Transport 等理论知识,但其实做法很简单——把两个分别训练的 DDIM 用 latent space 连接起来,就可以完成 image-to-image translation 了,如下图所示:

具体而言,设有两个分别在源域 A 和目标域 B 上预训练好的扩散模型,输入一张域 A 的图像,DDIB 首先在第一个扩散模型上用 ODESolver(如 DDIM)把输入图像转换为隐变量,再在第二个扩散模型上用 ODESolver(如 DDIM)把该隐变量转换到域 B,就完成了域 A 到域 B 的迁移。
尽管 DDIB 非常直观简单,相比其他 image-to-image translation 方法,它有几个优点:
- 具有 cycle consistency:
- DDIB 用的两个扩散模型分别训练互不干扰,可以保证数据隐私性。
- 如果要在
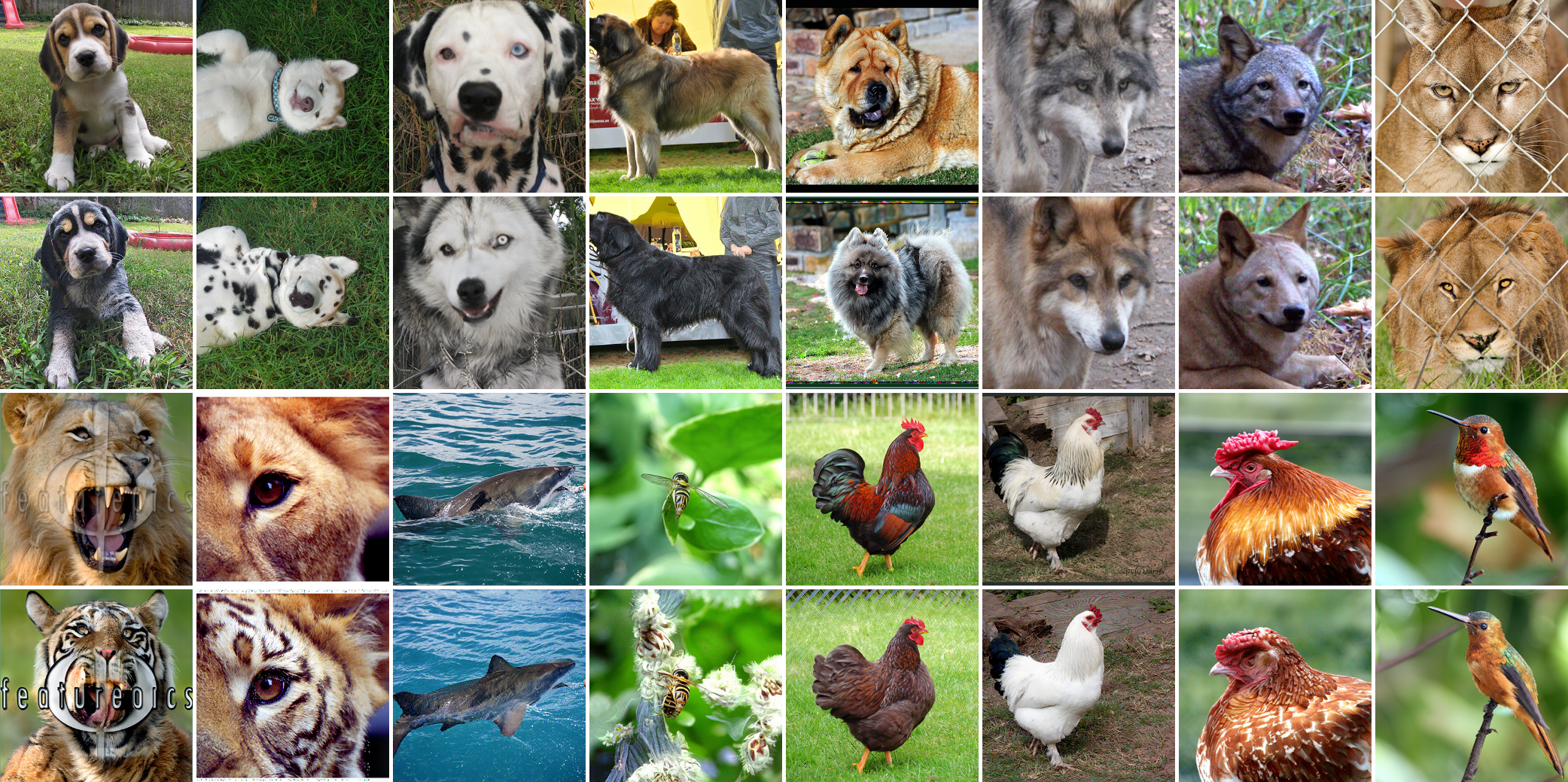
但是,DDIB 毕竟没有显式地指导,所以转换过程也较难控制。特别地,当源域和目标域比较接近时(如狮子和老虎),DDIB 还能较好地工作;但是如果二者差距太大(如鸟和狗),那么源域图像中的主体的姿态就很难被保留下来。
点击查看 DDIB 的生成样例(摘自官网)
DDNM
PKU Shenzhen ICLR 2023 spotlight 2022.12.01
论文作者的知乎讲解:链接
在图像恢复任务中,超分、填充、上色对应的退化模式(下采样、掩码、灰度化)都属于线性退化,可以表达为如下形式:
一般而言,同一个退化图像可以对应多个真实图像(称为 ill-posed problem),因此我们的目标其实是:
- Consistency:求解
- Realness:
为解决这个问题,论文作者首先指出了 range-null space decomposition. 设
将 range-null space decomposition 应用到图像恢复任务中,我们能直接构造出满足 consistency 的解:
我们知道,扩散模型在第

相比 DDPM,这里扩散模型只参与了 null-space 一项的计算,range-space 一项是我们直接计算的,所以作者将这种方法称为 Denoising Diffusion Null-Space Model (DDNM)[9].
可以看到,DDNM 要求我们知道
- 填充:mask 就是
- 上色:
- 超分:与上色类似,取
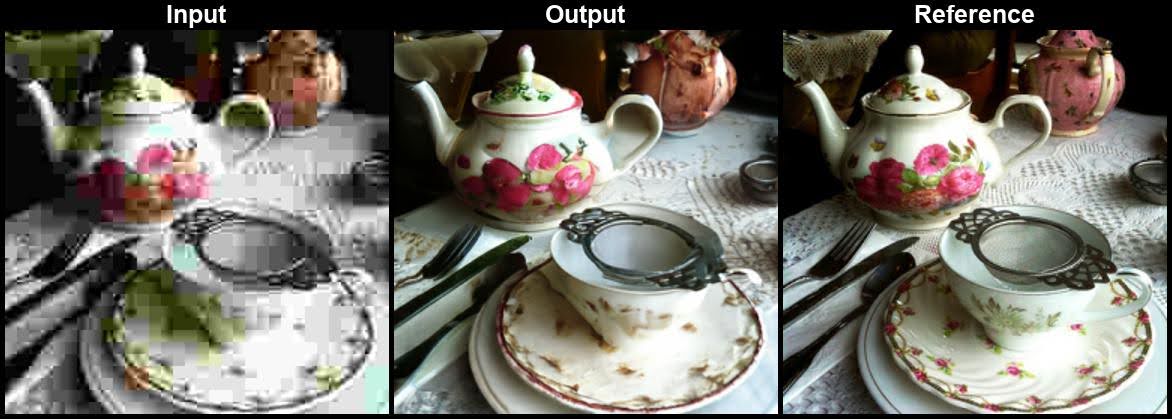
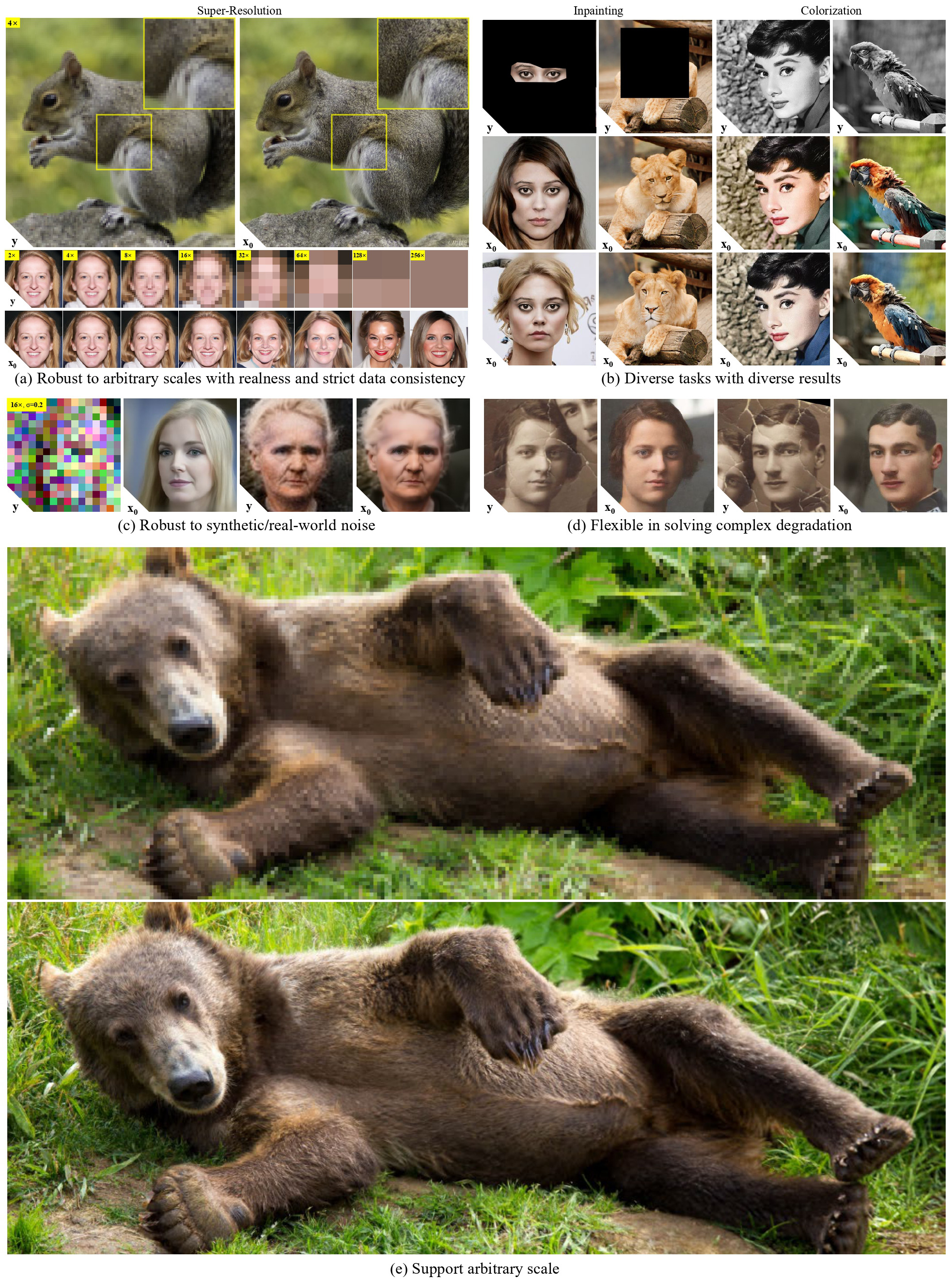
- 复杂退化:以老照片修复为例,我们既需要填充划痕,又需要上色,还可能需要超分。因此
DDNM 可以解决没有噪声干扰的图像恢复任务,但是不能很好地解决带噪声的任务。为此,作者提出了 DDNM+,做了两方面的改进:
对于带噪声的任务,作者将其建模为:
再看第二个式子,
前文说过,我们引入两个参数是希望
Time-Travel Trick. 作者发现,在大规模 average pooling 的超分、大 mask 填充、低采样率的压缩感知场景下,DDNM 的效果并不好。这是因为
DDNM+ 的算法如下所示:

点击查看 DDNM 的生成样例(摘自官网)
References
- Saharia, Chitwan, Jonathan Ho, William Chan, Tim Salimans, David J. Fleet, and Mohammad Norouzi. Image super-resolution via iterative refinement. IEEE Transactions on Pattern Analysis and Machine Intelligence (2022). ↩︎
- Meng, Chenlin, Yutong He, Yang Song, Jiaming Song, Jiajun Wu, Jun-Yan Zhu, and Stefano Ermon. Sdedit: Guided image synthesis and editing with stochastic differential equations. In International Conference on Learning Representations. 2021. ↩︎
- Choi, Jooyoung, Sungwon Kim, Yonghyun Jeong, Youngjune Gwon, and Sungroh Yoon. ILVR: Conditioning Method for Denoising Diffusion Probabilistic Models. In 2021 IEEE/CVF International Conference on Computer Vision (ICCV), pp. 14347-14356. IEEE, 2021. ↩︎
- Saharia, Chitwan, William Chan, Huiwen Chang, Chris Lee, Jonathan Ho, Tim Salimans, David Fleet, and Mohammad Norouzi. Palette: Image-to-image diffusion models. In ACM SIGGRAPH 2022 Conference Proceedings, pp. 1-10. 2022. ↩︎
- Lugmayr, Andreas, Martin Danelljan, Andres Romero, Fisher Yu, Radu Timofte, and Luc Van Gool. Repaint: Inpainting using denoising diffusion probabilistic models. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 11461-11471. 2022. ↩︎
- Avrahami, Omri, Dani Lischinski, and Ohad Fried. Blended diffusion for text-driven editing of natural images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 18208-18218. 2022. ↩︎
- DDRM ↩︎
- Su, Xuan, Jiaming Song, Chenlin Meng, and Stefano Ermon. Dual diffusion implicit bridges for image-to-image translation. In The Eleventh International Conference on Learning Representations. 2022. ↩︎
- Wang, Yinhuai, Jiwen Yu, and Jian Zhang. Zero-Shot Image Restoration Using Denoising Diffusion Null-Space Model. arXiv preprint arXiv:2212.00490 (2022). ↩︎